
背景介紹 <<
客戶是一家提供電子技術解決方案的公司,為全球的電子和技術公司提供綜合的電子設計,生產和產品管理服務。現客戶有一款產品需要安轉在基座上,采用傳統的人工安裝,速度慢,良率低。針對此情況,我們為客戶開發了這款高精度,低耗時的定位貼合系統。
設計理念 <<
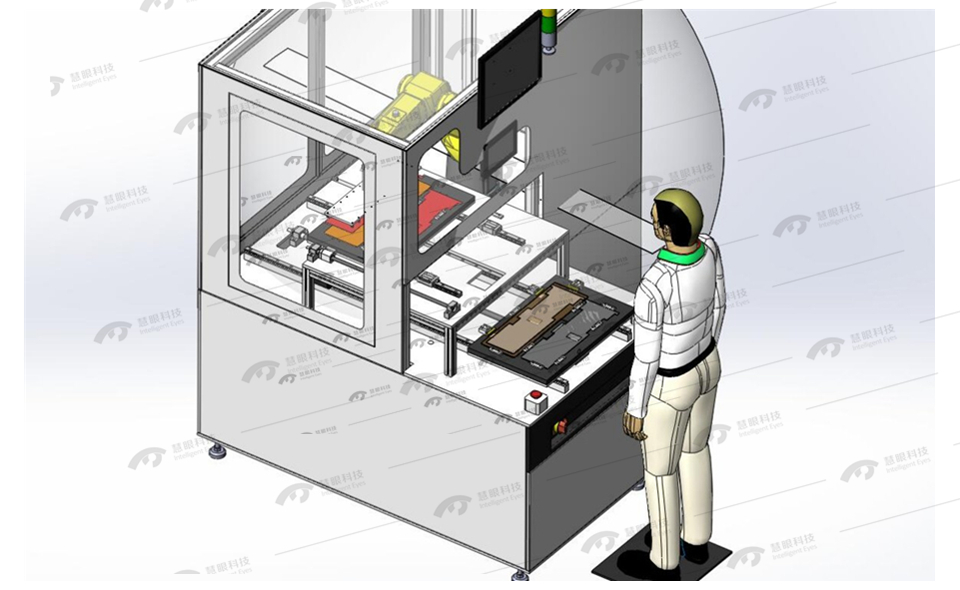
方案采用上下雙層送料方式,分為工位一、工位二,下層為蓋板,雙工位循環進出工作。由于客戶的產品體積大,一個相機無法保證裝配的精度,我們決定采用工業機器人+雙相機方案,以相機引導機器人到達對應位置來實現定位及引導貼合的應用。系統中的雙相機分別安裝在機器人的上方,通過計算標準拍照位置與實際拍照位置的位置與角度的差異來補正裝配位置。
應用前景 <<
本文描述了基于機器視覺的工業機器人定位系統,該系統運用慧眼自主開發的IEVision軟件,快速識別工件特征邊界和質心,數據分析和計算。機器人通過IEVision計算出的結果進行調整為姿,從而解決了機器人末端實際位置與期望位置相距偏差的問題,改善了裝配機機器人的定位精度。該方法計算量小,定位準確,速度快,具有工程實用性,有很大的發展前景。
 分享到
分享到